OBSTACLE AVOIDER
Project Description
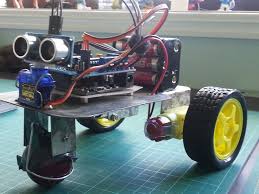
This project deals with a wheeled autonomous robot whose objective is to detect obstacles in between the path and to avoid them to complete the journey. Using two IR sensors, left and right sensors, the robot senses obstacles on left and right sides. These IR generators are monostable multivibrators which use NE555IC for generating 38 kHz frequency. IR signals are reflected back and are received by detector TSOP1738. This detector gives a low voltage output in the absence of obstacles and high voltage when obstacles come in the path. After obstacle detection the output signal is fed to Atmel 89C205I microcontroller which feeds its signal to motor driver L293D. The same technique can be implemented to build VISION BELT for the blind and to avoid accidents of vehicles in metropolitan cities.
Project Resources
Project Members
CYBORG Team